
lunes, 7 de diciembre de 2009
martes, 1 de diciembre de 2009
Calificaciones
¡Felicidades a los que pasaron!
Se puede subir calificación, conservando la calificación previa solamente en la segunda vuelta.
En la primera vuelta, se puede presentar examen para subir calificación bajo riesgo propio.
La calificación del departamental que eleva su calificación final se mantiene en primera y segunda vuelta. Las calificaciones de la clase y del blog se pierden si no exentaron.
¡Suerte a los que presenten examen final!



viernes, 27 de noviembre de 2009





domingo, 22 de noviembre de 2009








A5. Valencia Mora Ricardo Augusto
siendo x = (x1, x2) un vector cualquiera de R2, en dicho espacio vectorial se definen las aplicaciones lineales:

estudiar si forman una base del dual de R2 y hallar la base de R2 de la que son dual.
resolucion.
para saber si las aplicaciones dadas forman una base del dual de R2, comprobamos que son linealmente independientes. Tenemos:
reagrupando términos:

para obtener la base de R2 de la que son dual hacemos como en el ejercicio número 2:

y análogamente:

con lo que tendremos:
v1 = (1, -1) y v2 = (-1, 2).


aportacion sobre polinomios (gonzalez fascinetto omar)
una particula presenta un cierto desplazamiento como funcion del tiempo que tarda en realizarlo, la grafica que describe este movimiento ubica al tiempo en el eje de las abscisas y al desplazamiento en el eje de las ordenadas de modo tal que para ciertos tiempos, el desplazamiento de la particula es nulo (la particula se detiene por completo), estos tiempos son: t= 3s,0s y 4s. a partir de la informacion anterior determinar la funcion que describe el movimiento de la particula.
solucion:
el problema nos plantea la situacion de un movimiento variado donde para ciertos tiempos el desplazamiento se hace cero, como el tiempo esta situado sobre el eje "x" esto nos lleva a la idea de que los tiempos donde no hay desplazamientos son las raices de una funcion tipo polinomial donde f(t) es un polinomio de tercer grado debido a que hay tres tiempos en donde no hay desplazamiento (raices); teniendo como base esta idea se procede a tratar la situacion donde la solucion unica es la obtencion del polinomio a partir de sus raices y este fungira como la funcion f(t) que describa el movimiento de esta particula para cualquier tiempo.
se procede a obtener el polinomio con base a sus raices de la siguente forma:
1- se forman los factores a partir de las raices:
f(t)= (t-3)(t-0)(t-4) recordar que estos valores son las raices o tiempos donde no hay desplazamiento
2- hay que simplificar esta expresion:
f(t)= (t-3)(t-4)t
3- se desarrollan los productos:
f(t)=t2 – 4t – 3t + 12) t nota: t2 qiuere decir t elevada al cuadrado
f(t)= t3 - 4t2 -3t2 +12t = 0
por ultimo se agrupan terminos semejantes:
f(t)= t3 - 7t2 + 12t nota: t3 quiere decir te elevada al cubo
esta es la funcion que describe el movimiento de la particula para cuanquier tiempo y como comprobacion sustituimos los tiempos que se dieron al inicio en la funcion obtenida:
f(3)= (3)3 - 7(3)2 + 12(3) = 0
f(0)= (0)3 - 7(0)2 + 12(0) = 0
f(4)= (4)3 - 7(4)2 + 12(4) = 0
listo!!!!!!!!!
solucion:
el problema nos plantea la situacion de un movimiento variado donde para ciertos tiempos el desplazamiento se hace cero, como el tiempo esta situado sobre el eje "x" esto nos lleva a la idea de que los tiempos donde no hay desplazamientos son las raices de una funcion tipo polinomial donde f(t) es un polinomio de tercer grado debido a que hay tres tiempos en donde no hay desplazamiento (raices); teniendo como base esta idea se procede a tratar la situacion donde la solucion unica es la obtencion del polinomio a partir de sus raices y este fungira como la funcion f(t) que describa el movimiento de esta particula para cualquier tiempo.
se procede a obtener el polinomio con base a sus raices de la siguente forma:
1- se forman los factores a partir de las raices:
f(t)= (t-3)(t-0)(t-4) recordar que estos valores son las raices o tiempos donde no hay desplazamiento
2- hay que simplificar esta expresion:
f(t)= (t-3)(t-4)t
3- se desarrollan los productos:
f(t)=t2 – 4t – 3t + 12) t nota: t2 qiuere decir t elevada al cuadrado
f(t)= t3 - 4t2 -3t2 +12t = 0
por ultimo se agrupan terminos semejantes:
f(t)= t3 - 7t2 + 12t nota: t3 quiere decir te elevada al cubo
esta es la funcion que describe el movimiento de la particula para cuanquier tiempo y como comprobacion sustituimos los tiempos que se dieron al inicio en la funcion obtenida:
f(3)= (3)3 - 7(3)2 + 12(3) = 0
f(0)= (0)3 - 7(0)2 + 12(0) = 0
f(4)= (4)3 - 7(4)2 + 12(4) = 0
listo!!!!!!!!!

A5 OMAR JIMÉNEZ RODRÍGUEZ



Fe de erratas:
En ambos óvalos azules, que aparentemente están vacíos, debería decir ESPACIO VECTORIAL B
ÉXITO!
My BLOG
A- 5 SAYURI GARCÍA TREJO
Espacios vectoriales
Sea S la base canónica en R² y B={(1,1),(-1,1)} otra base.
a) Encuentre A, la matriz de transición de la base S a la Base B
b) Encuentre P, la matriz de transición de la base B a la Base S
c)¿Qué relación hay entre A y P?
d) Si [w]B=(3,-2), encuentre w
e) Si w=(3,-2), encuentre [w]B
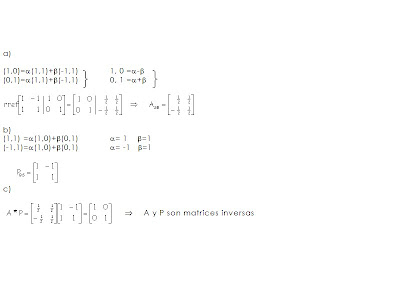 Conjetura: Si A es la matriz de transición de la base S a la base B, entonces A-1 es la matriz de transición de la base B a la base S,
Conjetura: Si A es la matriz de transición de la base S a la base B, entonces A-1 es la matriz de transición de la base B a la base S,En efecto, A[v]S = [v]B Þ [v]B = A-¹[v]S

A5 MARIANA LOYOLA ZARATE (mARianMARIANita.....)
Los espacios vectoriales aplicado en los movimientos del cuerpo.



como ya habiamos visto que un cojunto llamado E y otro llamado G y la manera que se pasa de uno a otro es con la matriz de transformacion llamada A y A -1( la inversa) de regreso.
Se puede aplicar lo mismo con los movimientos del cuerpo, pero especificamente con las extremidades superiores e inferiores.
con el factor como si las extremidades superiores estuvieran cargado una pesa.
y las inferiores como en la posicion de estiramiento y si estuviera soportando un objeto en la planta del pie.
Cuando las extremidades esten en reposo se llamara para las superiores E y para las inferiores E (prima).
y cuando esten en el moviento contrario se le llama G Y G ( prima).
Pero como le agregamos los factores las extremidades no pueden pasar de E a G, si hacer un movimiento previo.
Se muestran las imagenes del el calculo del vector y de las posiciones interpretadas como E, G, A y A inversa..

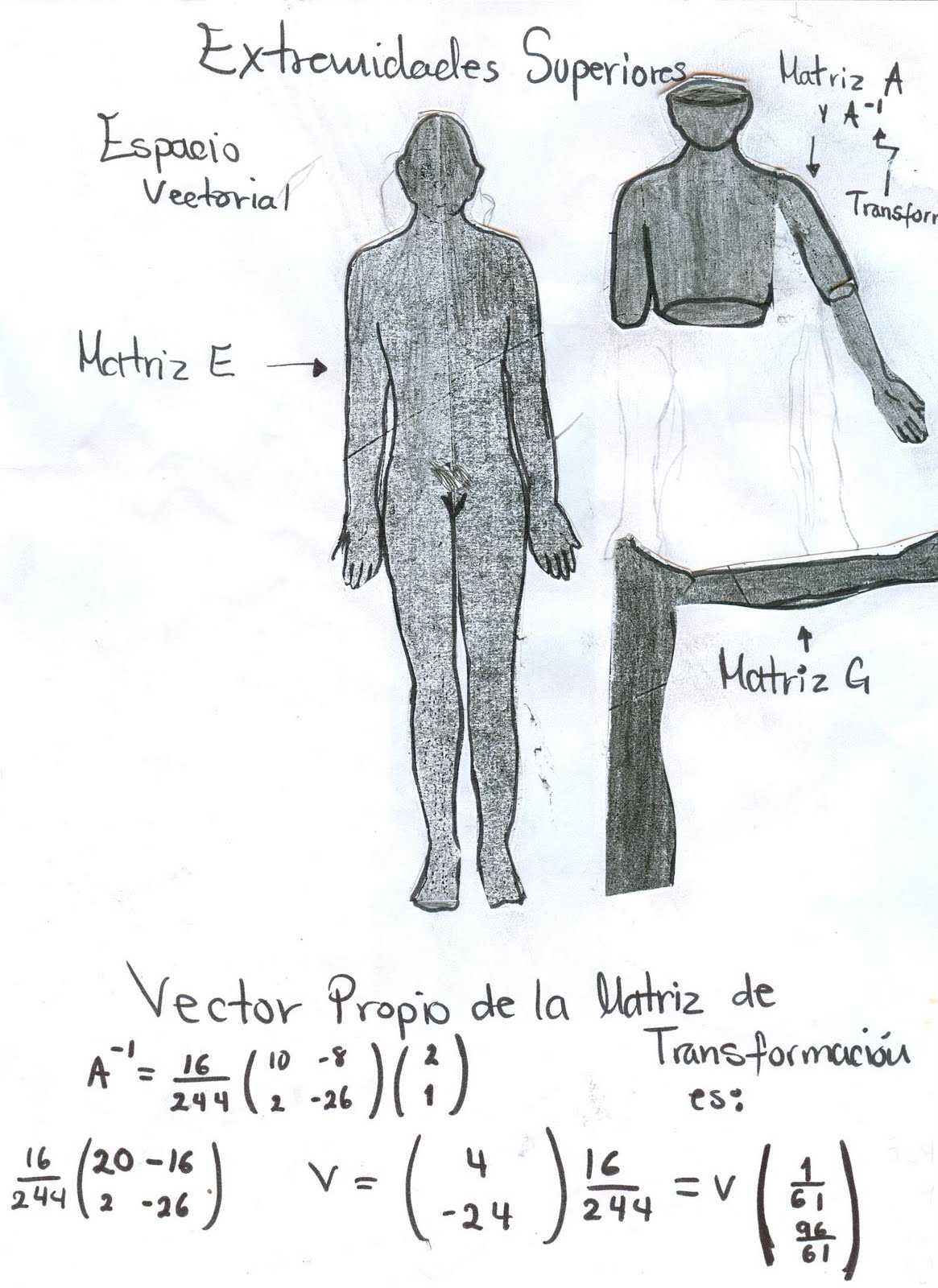

de E a G es la matriz A.
Y el valor del vector es la interpretacion de G a E por medio de la inversa de A





A5- MANUEL MEZA OERTGA


Es la 5a aportación, me confundí a la hora de escribirlo.
El tema es impedancia en circuitos para poder calcular la corriente del sistema; se utilizan complejos para esto.
A-5. Enrique Caldera Cruz
Problema de cambio de base de espacios vectoriales:
Sea B={(1,0,-1),(-1,1,0),(1,1,1)} y
C ={(1,1,0),(1,0,1),(0,1,1)} bases
de Â3.
Queremos hallar la matriz de transición de la base B
a la Base C. Para ello expresamos los vectores de la base B como combinación lineal de los vectores de la base C, es decir
(1,0,-1) = a(1,1,0)+ß(1,0,1)+g(0,1,1)
(-1,1,0) = a(1,1,0)+ß(1
,0,1)+g(0,1,1)
(1,1,1) = a(1,1,0)+ß(1,0,1)+g(0,1,1),
lo cual nos lleva a los 3 sistemas de ecuaciones que tienen la misma matriz,
| 1 = a+ß | -1 = a+ß | 1 = a+ß |
| 0 = a+g | 1 = a+g | 1 = a+g |
| -1 = ß+g | 0 = ß+g  | 1 = ß+g |
<---> [(1,0,-1)]c = (1,0,-1) [(-1,1,0)]c = (0,-1,1) [(0,1,1)]c = (1/2, 1/2, 1/2)
por lo tanto la matriz de transición buscada es ,

en efecto, si w=(2,-3,4),
en el ejemplo anterior comprobamos que
(2,-3,4)= -3(1,0,-1) -4(-1,1,0) +1(1,1,1) --->
[(2,-3,4)]B = (-3,-4,1)

En efecto,
(-5/2) (1,1,0)+(9/2)(1,0,1)+(-1/2)(0,1,1)=(2,-3,4)


A-5: Chong López Fernando
EL PROBLEMA DE LA OBTENCIÓN DE VALORES Y VECTORES PROPIOS DE UN SISTEMA: APLICACIÓN EN LOS ORBITALES MOLECULARES
Si se tiene una determinante de la forma:
A – EI = 0 entonces E es una matriz columna cuyos elementos son los valores propios de la matriz del sistema o de una propiedad dada del mismo (que es cuadrada y simétrica) A, mientras que I es la matriz identidad (una matriz cuya diagonal es 1 y todos los demás términos son nulos). Se trata de un caso típico de valores y vectores propios y su solución se conoce rutinariamente como diagonalización de la matriz A.
Este problema tiene un planteamiento idéntico al de la determinante secular para la solución de los espectros de energía en una solución aproximada de la ecuación de Schrödinger de acuerdo con el principio variacional.
La aplicación más simple de este enfoque de álgebra lineal a la teoría atómico – molecular es la consideración de la función de onda de un estado electrónico molecular cualquiera u orbital molecular i como la combinación lineal de estados electrónicos atómicos o CLOA (LCAO en inglés):
ψi = ci1φ1 + ci2φ2 + ... = Σ ciμφμ
μ
donde los coeficientes ciμ dan la participación del orbital atómico
φμ en el estado u orbital molecular i.
Se puede probar que, si la matriz de los coeficientes es la de los vectores propios del sistema:

y la de la matriz del sistema, en este caso la energía expresada en términos de su composición de orbitales atómicos es:

se puede obtener un producto:
HC = ΛC
donde Λ es una matriz diagonal equivalente a H, cuya diagonal contiene a los valores propios E. Esto se considera como que la matriz de coeficientes de los orbitales moleculares C es la que puede transformar a la matriz de energía en términos de interacciones entre orbitales atómicos H en una matriz diagonal Λ, donde los elementos diagonales de la matriz son los valores propios o energías relacionadas con cada estado molecular.
Si se tiene una determinante de la forma:
A – EI = 0 entonces E es una matriz columna cuyos elementos son los valores propios de la matriz del sistema o de una propiedad dada del mismo (que es cuadrada y simétrica) A, mientras que I es la matriz identidad (una matriz cuya diagonal es 1 y todos los demás términos son nulos). Se trata de un caso típico de valores y vectores propios y su solución se conoce rutinariamente como diagonalización de la matriz A.
Este problema tiene un planteamiento idéntico al de la determinante secular para la solución de los espectros de energía en una solución aproximada de la ecuación de Schrödinger de acuerdo con el principio variacional.
La aplicación más simple de este enfoque de álgebra lineal a la teoría atómico – molecular es la consideración de la función de onda de un estado electrónico molecular cualquiera u orbital molecular i como la combinación lineal de estados electrónicos atómicos o CLOA (LCAO en inglés):
ψi = ci1φ1 + ci2φ2 + ... = Σ ciμφμ
μ
donde los coeficientes ciμ dan la participación del orbital atómico
φμ en el estado u orbital molecular i.
Se puede probar que, si la matriz de los coeficientes es la de los vectores propios del sistema:
y la de la matriz del sistema, en este caso la energía expresada en términos de su composición de orbitales atómicos es:
se puede obtener un producto:
HC = ΛC
donde Λ es una matriz diagonal equivalente a H, cuya diagonal contiene a los valores propios E. Esto se considera como que la matriz de coeficientes de los orbitales moleculares C es la que puede transformar a la matriz de energía en términos de interacciones entre orbitales atómicos H en una matriz diagonal Λ, donde los elementos diagonales de la matriz son los valores propios o energías relacionadas con cada estado molecular.




Suscribirse a:
Entradas (Atom)